This is a freeform clock made from mostly discrete components that I created over the lead up to Christmas and through to New Year. It’s something I’ve thought about for many years and finally got round to doing. I just made it up as I went along really, although I knew I wanted the round clock face design the rest of it was just how it ended up. I’d already bought a lot of transistors a couple of years back along with some brass rod and coated copper wire. I had also researched other designs and had some schematics for reference. I had a few issues along the way; mixing up an NPN transistor with a PNP didn’t help (it still worked in a fashion), wrong value capacitors, dropping side cutters on a 7-segment LED and shorting it across the supply and I ended up rebuilding the seconds section. Despite all that I have to say it was really therapeutic, just tinkering away in the workshop in my own world and seeing it slowly come together.













Details
I looked at a lot of other clock designs before starting this and eventually decided I liked the ring counter used in this clock (with schematic and YouTube video)
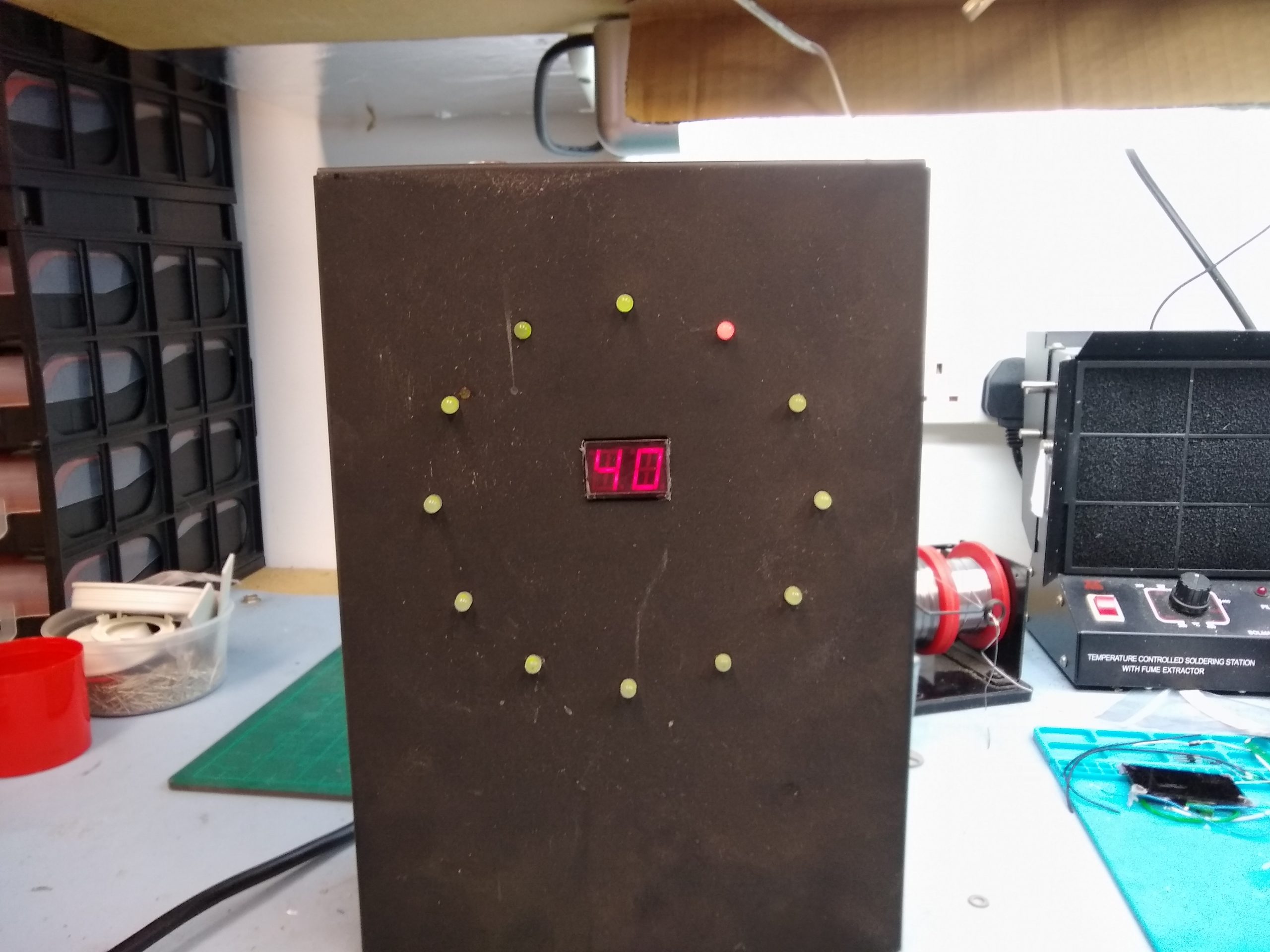
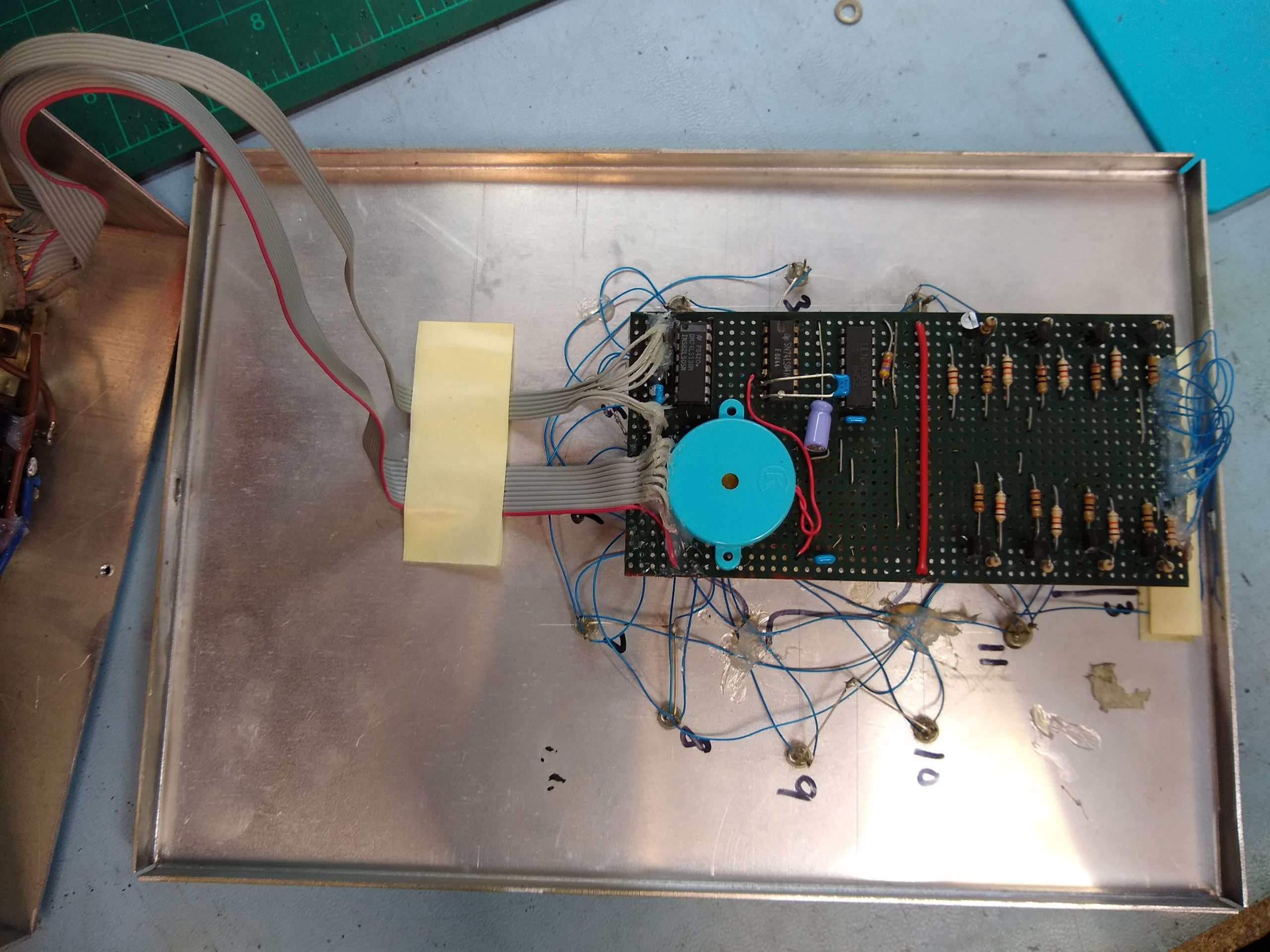
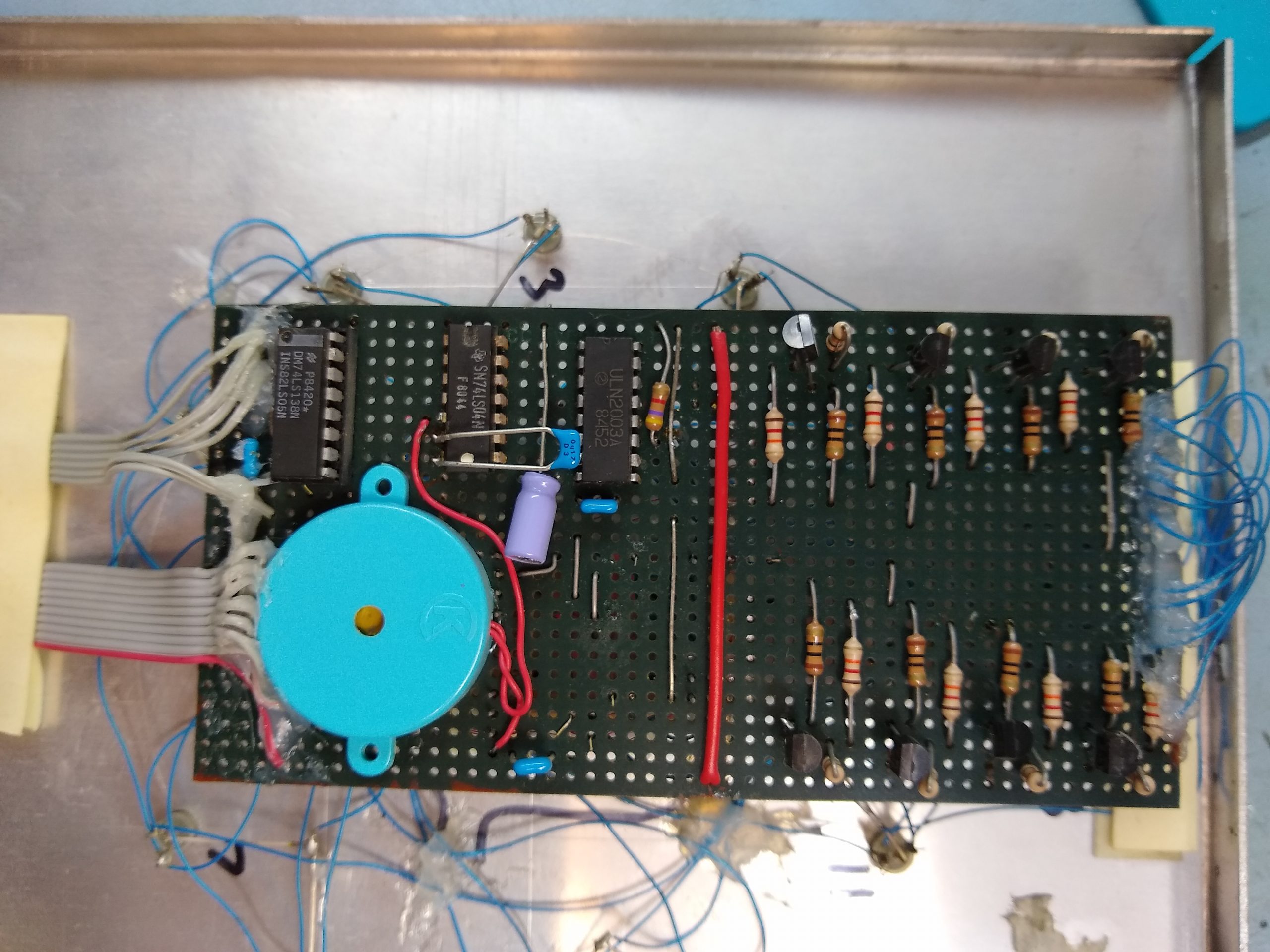
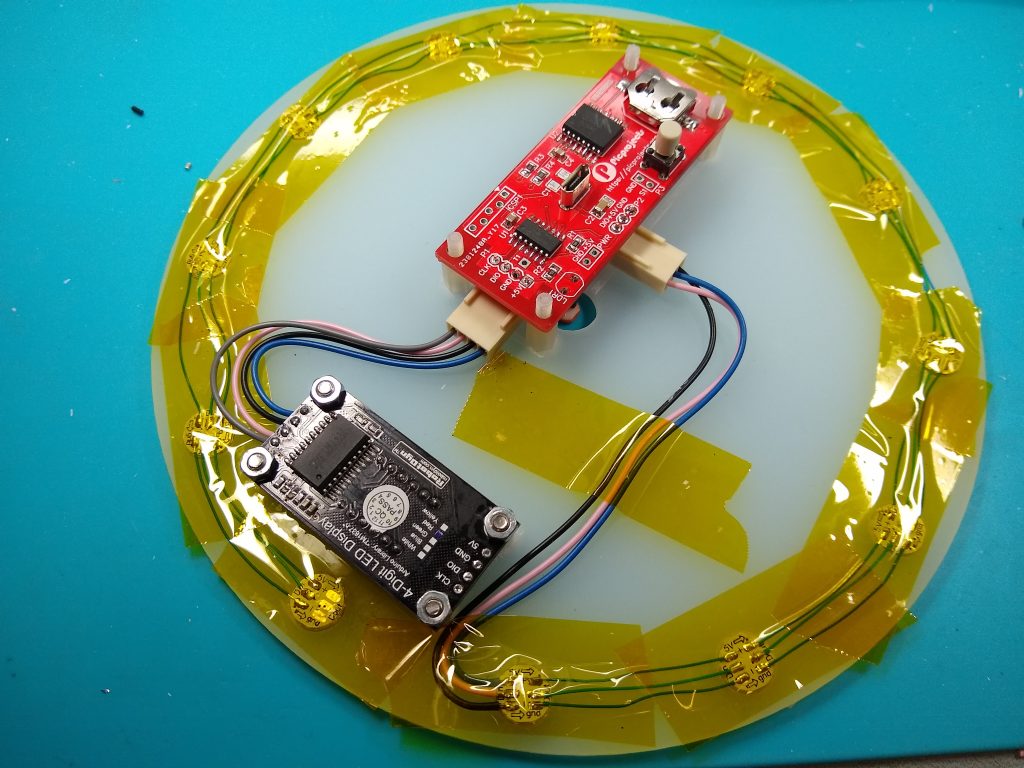
I wanted to stick with an all discrete design, but made concessions for the 7-segment LEDs and the 32.768KHz crystal and divider (CD4060 14 stage ripple carry binary counter/divider and oscillator and CD4013 dual D-Type flip-flop). I had also planned to have the minutes 7-segment LEDs free-form wired, but gave up on that – might revisit it one day, it does look better for real than the photographs show.

The clock is powered by a 12-volt supply, specifically an old TP-Link router plug-top PSU I had spare, and it draws around 230mA.
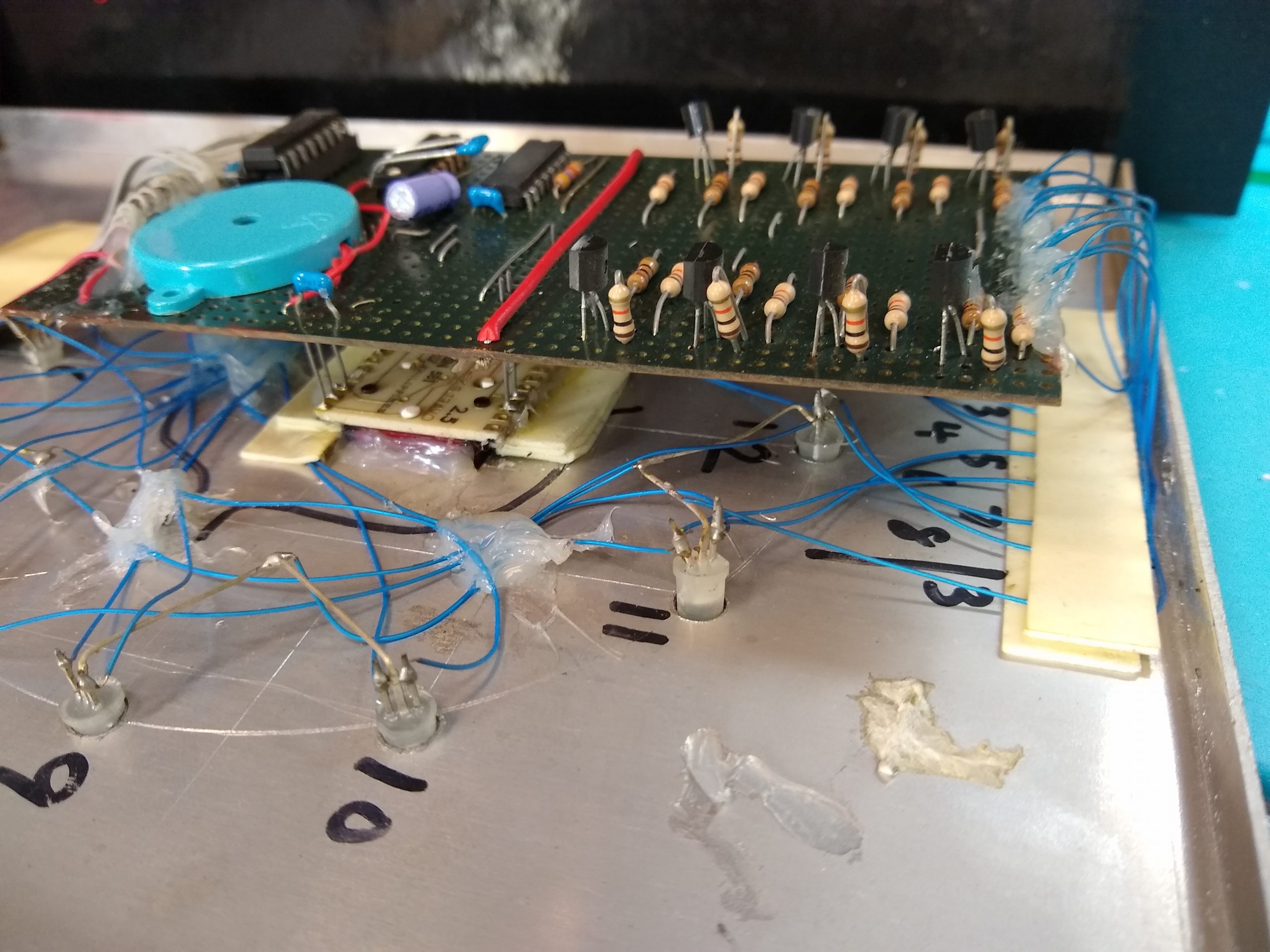
The 32KHz oscillator/divider section outputs a 1Hz pulse. This drives the first of three ring counters, which divide the signal down to produce a 1-minute clock pulse. I wanted the minimum number of ring counter stages necessary to divide the seconds into minutes. Using 5, 4, and 3 stages in sequence results in a total division of 60/5/4/3=1
Additionally, the seconds stages have LEDs connected across the bottom emitter resistors. This setup works well— the LEDs are not overly bright and provide a dynamic visual effect, adding some animation to the clock for extra interest.
Originally I used the one bias voltage everywhere, but ended up building seperate ones for the seconds section and the hours with the one shown just supplying the minutes section.
The hour 7-segment LEDs are hard wired for each number position using 1/8 watt resistors on the back of the LED, the whole LED driven from a single transistor.
Adjusting the clock is done by injecting pulses derived from upper stages of the CD4060 divider using the two buttons at the bottom edge
The transistors used in the ring counter stages are BC547 NPN transistor and BC556/BC558 PNP – the cheapest I could source from a reputable supplier in the UK.
I used 0.8mm/1mm brass rod and 0.8mm silver coated copper wire, the latter is easier to form and bend, the brass rod holds it shape better but is harder to bend. I drilled holes in the wood back board and pushed 0.8mm brass rod into them to form stand-off mounts and soldered the circuit sections to them. For the hour 7-segment LEDs I used 2mm brass rod for supporting pillars. I think the backing board would have been better in a lighter colour than the grey, but that is what I had.
One final tip – if you do something like this I’d recommend you use a current limited PSU for testing, and solder a reverse biased diode across the supply rails – don’t ask me why 🙂
Rigol DHO800

I also treated myself to a new Rigol DHO804 scope – couldn’t resist it with Black Friday 30% discount. I’ve got it mounted on a spring loaded VESA arm and it’s a real game changer. Although the 7″ display is quite small for ageing eyesight, the VESA arm lets you position the scope anywhere over the work area at a comfortable viewing distance.
I won’t go in to details of the scope as there are many YouTube videos that cover it already. I’ve have a Rigol DS1054Z that I bought in 2015 and is a great scope, perfectly adequate for my needs but this DHO804 is nicer to use with its touch screen menus. Both my scopes have had the hack/upgrades for memory/bandwidth/decode options that you can find on Internet forums. Quite easy to do and not had any issues once a self-calibration was done post-upgrade.
Another thing I’ve done and recommend, is getting a matt protection film for the display. I’ve fitted one and it has made a significant improvement to the display by reducing reflections while not affecting the function of the touch screen. The one I bought was branded for a DHO900 scope, but since the display on the DHO800 and DHO900 are physically the same display it fitted perfectly.